| 描述 | DIODE SCHOTTKY 30V 200MA SOT-23 | 电流 - 在 Vr 时反向漏电 | 2?A @ 25V |
|---|---|---|---|
| 电流 - 平均整流 (Io)(每个二极管) | 200mA | 电压 - (Vr)(最大) | 30V |
| 反向恢复时间(trr) | 5ns | 二极管类型 | 肖特基 |
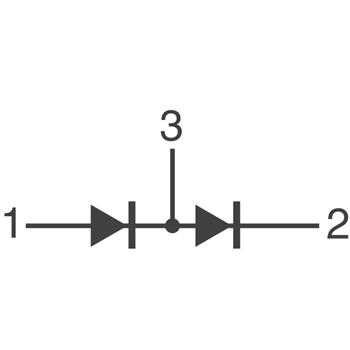
| 速度 | 小信号 = | 二极管配置 | 1 对串联 |
| 安装类型 | 表面贴装 | 封装/外壳 | TO-236-3,SC-59,SOT-23-3 |
| 供应商设备封装 | SOT-23-3(TO-236) | 包装 | Digi-Reel? |
| 其它名称 | BAT54SFSDKR |
本例描述了一种采用小型微控制器传感器模块的电路,它只有三个连接:5vdc、一个rs-232传输数据输出端、地。专用的单电压电平转换器或dc/dc转换器可能太贵了,但设计仍需要提供1ma的±3v电压,以驱动数据传输脚。由于在5v微控制器上的空余pwm(脉冲宽度调制)输出能够在近5v时驱动±5ma电流,因此,用一只bat54s双串联肖特基二极管、两只电容以及一只限流电阻构成的pwm电压转换器就可以提供负电压(图1)。 图1,二极管与电容提供了负电压。 微控制器的pwm输出用一个1khz、50%占空比的0~5v波形,驱动转换器。当pwm输出为5v时,它为c1充电。d1中下方的二极管为正偏,将端子连接到地。当pwm输出为低时,使d1中上方二极管正偏,将c1中的电荷送至c2。同时,它将c1的正电荷端接至近地电势,从而使电荷反转。当pwm输出再次变为高时,这个循环重复。 由于d1的最小电压降为0.2v,不可能从5v得到-5v,因此,每个相位损失0.2v,电压输出约为-4.6v。只有当驱动微控制器对转换期间的电流瞬变很敏感,或转换的瞬流会干扰微控制器的模拟输入端时,设计才需要使用限流电阻r ...
c2的串联等效电容为cs12, 则差模滤波器的截止频率fd由rd、r1、r2、cs12和c3 确定, 共模滤波器的截止频率fc由rc、r1、r2、c1、c2 确定。 由于传感器信号传输线较长, 其寄生电感与放大器输入电容容易组成lc 谐振电路, 产生过冲和振荡, 为此, 在信号线上串联小电阻r1、r2 作为补偿电阻, 以减小或消除振荡。图1 中, 电容c4、c5 分别与电阻r3、r5 组成一阶低通滤波器, 抑制放大器噪声; 电阻r6、r7对运放进行环内补偿, 增加运放带容性负载的能力;bat54s 作为保护器件加在放大器输入端, 防止静电放电以及输入电压超出运放最大输入电压范围而损坏运算放大器。 1.2 交流耦合差分放大电路 交流耦合差分放大电路如图2 所示。电容c9、c10、c11 的值远小于电容c7、c8 的值, 因此, 电容c9、c10、c11 对图2 中高通滤波器的影响可以忽略, 从而可得共模高通滤波器的截止频率fhpc。 假设电容c7 与c8 的串联等效电容为cs78, 则差模高通滤波器的截止fhpd频率为: 电阻r10、r11 为运放提供偏置电 ...
bat54s双肖特基二极管 ...
试验了,结果差不多。加了电阻和不加电阻,基本没有区别,加的470欧的电阻,加bat54s,对地,对5v反向的二极管,出现复位就很少了,而且改进了程序,复位也不影响pc端程序,就ok了。还是谢谢几位大侠。只是这样就对freescal的mcu反而没有什么信心了。 :-( ...

【NXP Semiconductors】BAT54S /T3,肖特基(二极管与整流器) DIODE SCHTKY TAPE-11

【NXP Semiconductors】BAT54S,215,DIODE SCHOTTKY 30V DUAL SOT23
【NXP Semiconductors】BAT54S,235,DIODE SCHTK DUAL 30V 200MA SOT23
【Fairchild Semiconductor】BAT54S_D87Z,DIODE SCHOTTKY 30V 200MA SOT23
【Fairchild Semiconductor】BAT54S_ND87Z,DIODE SCHOTTKY 30V 200MA SOT23
【Fairchild Semiconductor】BAT54S_NL,肖特基(二极管与整流器) 30V 200mA Pb-FREE DUAL SERIES
