

| 描述 | SENSOR ACCEL 3-AXIS +/-1.5 16QFN | 加速范围 | ±1.5g,2g,4g,6g(配置) |
|---|---|---|---|
| 灵敏度 | 800mV/g,600mV/g,300mV/g,200mV/g | 电源电压 | 2.2 V ~ 3.6 V |
| 输出类型 | 模拟 | 带宽 | 350Hz - X,150Hz - Z |
| 接口 | - | 安装类型 | 表面贴装 |
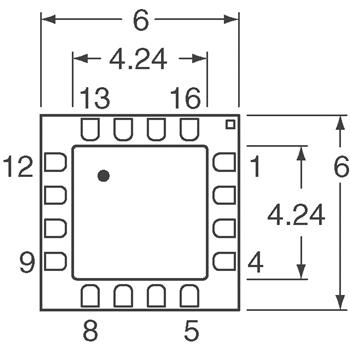
| 封装/外壳 | 16-LQFN 裸露焊盘 | 供应商设备封装 | 16-QFN(6x6) |
| 配用 | RD3152MMA7260Q-ND - BOARD REF 3-AXIS ACCELEROMETERRD3112MMA7260QE-ND - BOARD DEMO STAR FOR MMA7260QT |
引言 本项目设计的是无线遥控直升机接收控制电路。本设计采用飞思卡尔公司生产的mma7260qt低量程三轴向加速度传感器和低功耗的mc9s08qg8 微控制器,并配合极少量的外围器件。该电路能接收无线遥控发射机的控制指令,使直升机以不同的速度前进、后退、转弯,在没有收到动作指令时能使直升机自动保持稳定。由于该电路的体积小(32×12mm),重量轻,因此可以用于超小型遥控直升机。 设计概述 该系统能通过红外遥控指挥直升机以不同的速度前进、后退、转向。该系统主要有两大部分:第一部分输入转换、指令编码、红外发射部分;第二部分红外接收、解码、飞行状态检测、伺服电机控制部分。这两部分的红外接收部分不是本次设计的重点,不做详述。 直升机是由三个小型电机控制的:一个主旋翼电机,控制飞机的上升或下降;一个尾翼电机,控制飞机的方向;一个前进/后退电机,控制飞机前进或后退。本系统利用螺旋桨产生的推力使直升机的重心发生改变,使直升机向前或向后倾斜,来实现直升机的前进或后退。对直升机的准确控制,就是通过对这三个电机速度的准确控制来实现的。 利用mma7260qt三轴向加速度传感器将直升机的飞行状 ...
景 现在市面上的电动摇篮仅有简单的定时功能,因此不能针对婴儿的活动发生动作,若摇篮一直摇动,对婴儿的安抚作用就会降低。采用声音触发的自动摇篮,缺点是婴儿先是活动,得不到安抚则会哭闹,摇篮才会启动进行安抚;另外如果因为别的原因哭闹,摇篮则不能起到安抚作用。所以根据婴儿的活动来启动摇篮是比较妥当的控制方式。飞思卡尔的加速度传感器性能优秀,成本较低,适合这样的应用。 自动摇篮的原理 本系统采用飞思卡尔mc9s08qg8单片机作为控制器,使用飞思卡尔加速度传感器mma7260qt判断婴儿的活动情况,同时用麦克风检测婴儿哭闹的声音作为辅助判断,然后根据设置启动摇篮摇动。人机界面由键盘和点阵液晶显示器组成。 测量运动的方法 加速度传感器测量运动和动作有很多算法,本系统中由于摇篮的活动方向是二维的,而且主要是其中的一维(所以采用一维加速度传感器也可以),运动情况单一,场合也不复杂,所以采用简单的阈值判断的方法即可实现。阈值代表着灵敏度,可由用户根据实际情况选择。 触摸按键的实现 触摸按键是近年比较流行的技术,由于mc9 ...
部分信息显示使用液晶屏 系统架构设计 根据跌倒探测器的需求分析,具体的实现方案设计采用如图2所示的架构。该架构基于高性能、低功耗mcu--mc9s08qg8,通过获取加速度传感器的采集信息,经分析和计算后实现跌倒探测及报警等多项功能。 硬件设计 硬件设计围绕mcu展开,产品采用mc9s08qg8芯片,如何充分利用芯片资源,妥善完成产品的各项任务处理,是设计的关键。参考系统结构框架,根据功能模块划分,系统的硬件设计详细描述如下: 加速度采集电路 加速度采集使用mma7260qt,该芯片输出为模拟信号,需进行a/d转换后才能进行数据处理。mc9s08qg8芯片的pa脚为复用通道,可根据需要设置为i/o、键盘中断或a/d采样通道。本设计将利用mc9s08qg8芯片内部的a/d模块实现模数转换,具体实现中采用pa0、pa1和pa2作为三轴加速度的采集通道,与mma7260qt的xout(pin15)、yout(pin14)和zout(pin13)相连,a/d采样的控制时钟通过软件配置mc9s08qg8相应控制寄存器完成。 mcu外围电路 本设计中,mcu外围电路 ...
较长的响应延时,刷新一幅128×64的单色图像就需要1024×72μs=73.7ms(st7920),这简直无法实现图像的动态显示。还有一个问题是显示模块与信源的通讯,模块化设计要有方便的数据接口以适应不同的要求,还要考虑到显示模块长期的振动会使通讯电缆造成疲劳损坏。 设计概述 基础振动的绝对位移值的测量 上文提到,基础振动的绝对位移值的测量可归纳为对一个加速度 a<10.87的振动进行实时测量,并对加速度a作二次积分计算位移值。本系统中加速度传感器采用低量程三轴向加速度传感器mma7260qt,最大量程为±6g,响应频宽为fxy=350hz、fz=150hz,mma7260qt的敏感方向如图3所示,xy轴输出电压与芯片平面内的加速度成比例。 因为所要测量的加速度值和重力加速度值在一个量级,所以要考虑重力加速度的影响。让传感器平面平行于显示器件平面(如图4中的abc平面为显示器平面,平面为水平面),初始位置时传感器各轴所测得的加速度分量ax0、ay0、az0反映了显示器相对水平面的倾角(图4中的θ1、θ2)。如果显示器只在当前平面内做平动,ax0、ay0、az0就是x ...
8通道)的a/d转换器,3个具有比较模式的灵活定时器/计数器,512 字节的eeprom,片内/外中断,5种可通过软件选择的睡眠模式,以及8 kb的系统内可编程flash存储器(可随时在线编程),易于产品设计和更新。同时,atmega8l可达到接近1 mips/mhz的性能,运行速度比普通cisc单片机高出10倍,并且该器件价格不高,为许多嵌入式控制应用提供灵活且低成本的解决方案。另外,atmega8l的工作电压为2.7~5.5 v,非常适用于那些电压波动较大的场合。 2.2 加速度传感器mma7260qt与单片机接口设计 该系统设计选用加速度传感器mma72600t,测量加速度。该器件采用mems原理制作的低成本、低功耗、单芯片集成xyz三轴感应加速度传感器,可准确测量0~350 hz、±6 g范围内动态或静态加速度,还能够监测车体微小震动和整车的倾斜角度。该器件内部集成了信号调理、单极低通滤波器和温度补偿技术,并提供4个量程 (1.5g、2 g、4 g、6 g)可选,2.2~3.6 v单电源供电,工作电流小于500μa,休眠模式下最低供电电流仅为3μa。 mma7260qt加速度传 ...

【Freescale Semiconductor】MMA7261Q,SENSOR ACCEL 3-AXIS +/-2.5 16QFN
【Freescale Semiconductor】MMA7261QR2,SENSOR ACCEL 3-AXIS +/-2.5 16QFN
【Freescale Semiconductor】MMA7261QT,IC ACCELEROMETER XYZ AXIS 16-QFN
【Freescale Semiconductor】MMA7268QR2,IC ACCELEROMTR 1.5G 3AXIS 16QFN
【Freescale Semiconductor】MMA7268QT,IC ACCELEROMTR 1.5G 3AXIS 16QFN
【Freescale Semiconductor】MMA7330L,IC ACCELEROMETER 3AXIS 14-LGA
【Freescale Semiconductor】MMA7330LR1,IC ACCELEROMETER 3AXIS 14-LGA
【Freescale Semiconductor】MMA7330LR2,IC ACCELEROMETER XYZ AXIS 14-LGA
